root@raspberrypi:~# parted /dev/sda
GNU Parted 3.2
Using /dev/sda
Welcome to GNU Parted! Type 'help' to view a list of commands.
(parted) mktable msdos
Warning: The existing disk label on /dev/sda will be destroyed and all data on
this disk will be lost. Do you want to continue?
Yes/No? yes
(parted) mkpart primary fat32 0% 100M
(parted) mkpart primary ext4 100M 100%
(parted) print
Model: StoreJet StoreJet Transce (scsi)
Disk /dev/sda: 120GB
Sector size (logical/physical): 512B/512B
Partition Table: msdos
Disk Flags:
Number Start End Size Type File system Flags
1 1049kB 99.6MB 98.6MB primary fat32 lba
2 99.6MB 120GB 120GB primary ext4 lba
(parted) quit
Information: You may need to update /etc/fstab.
import glob, os
# Current directory
current_dir = os.path.dirname(os.path.abspath(__file__))
# Directory where the data will reside, relative to 'darknet.exe'
path_data = 'data/obj/'
# Percentage of images to be used for the test set
percentage_test = 10;
# Create and/or truncate train.txt and test.txt
file_train = open('train.txt', 'w')
file_test = open('test.txt', 'w')
# Populate train.txt and test.txt
counter = 1
index_test = round(100 / percentage_test)
for pathAndFilename in glob.iglob(os.path.join(current_dir, "*.jpg")):
title, ext = os.path.splitext(os.path.basename(pathAndFilename))
if counter == index_test:
counter = 1
file_test.write(path_data + title + '.jpg' + "\n")
else:
file_train.write(path_data + title + '.jpg' + "\n")
counter = counter + 1


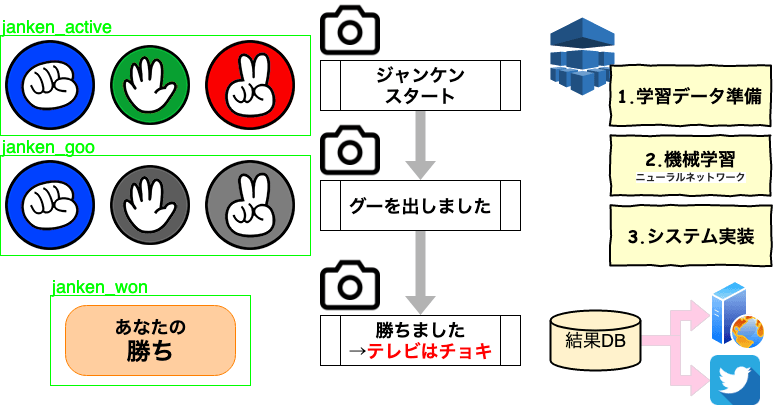

 Choki(チョキ)
Choki(チョキ)  Pa(パー)
Pa(パー)